358__LED_MATRIX CLOCK WITH 50Hz TIME BASE.
Quote from Defran on March 7, 2024, 10:31 am
358__LED_MATRIX CLOCK_WITH 50Hz TIME BASE. (Simulide R2220 or Higher)
This example is a 24-hour clock with 6 8x8 LED matrices, manual time setting, two brightness levels and audible seconds indication. At startup it starts counting from zero, with the SEC LED flashing. To adjust the time, press the [SET] switch (the SET LED lights up). Press and hold the [H] or [M] buttons to adjust the hours and minutes respectively. In this state the seconds are reset to zero and by pressing [BRI] you can change the brightness level of the display LEDs. Pressing [SET] again starts the clock counting. Pressing the [SON] switch activates a short tone every second.
SCHEMA:
The scheme is based on Atmel's ATM328 controller (Arduino UNO controller). The display is a "conceptually continuous" matrix of 6 8x8 LED digits. with SCK, DIN and CS inputs to access the MAX7219CNG integrated circuits of each digit. Three switches SET, BRI and SON and two buttons H and M with ground connection are used, all for the respective functions already described. There are two indicator LEDs, cathode to ground (SET and SEC). The circuit power supply (outside the simulator) is provided by a 0.6VA transformer with a 6V output followed by a bridge rectifier, filter and regulator to obtain 5V DC. The AC signal for the clock is taken from one of the secondary outputs, it is rectified and regulated to 5.1V to obtain positive pulses of 50Hz (electrical network frequency). This signal will activate the controller's Int0 interrupt as a time base signal. The 50Hz frequency is very stabilized and self-regulated by the electric company, so in reality it behaves practically like a quartz oscillator.
PROGRAM:
Arduino C program that uses the "LedControl.h" library and Interrupt 0 to capture the clock signal at 50Hz. Contains comments on the main points of the development idea.
// LED MATRIX CLOCK 24 HOURS WITH ELECTRICAL NETWORK TIME BASE (50Hz). DEFRAN24 #include "LedControl.h" LedControl lc=LedControl(7,8,6,6); // DIN, CK, CS, NUM. int HoD=0, HoU=0, MiD=0, MiU=0, SeD=0, SeU=0, Min=3, Hour=4; int SET=5; int buz=10; int SEC=13; int DPs=0; int BRI=19; int SON=18; int dp; int inck=2; // 50Hz Interrupt Input. int LSET=15; int ONDA=0; // Pulses counter int BR=15; // Brightness Value. int fset=48; // Max 50. void setup() { pinMode(SET, INPUT_PULLUP); pinMode(Hour, INPUT_PULLUP); pinMode(Min, INPUT_PULLUP); pinMode(BRI, INPUT_PULLUP); pinMode(SON, INPUT_PULLUP); pinMode(buz, OUTPUT); pinMode(SEC, OUTPUT); pinMode(inck, INPUT); // Network 50Hz input. pinMode(LSET, OUTPUT); digitalWrite(SEC, LOW); lc.shutdown(0,false); lc.shutdown(1,false); lc.shutdown(2,false); lc.shutdown(3,false); lc.shutdown(4,false); lc.shutdown(5,false); lc.setIntensity(0,BR); lc.setIntensity(1,BR); lc.setIntensity(2,BR); lc.setIntensity(3,BR); lc.setIntensity(4,BR); lc.setIntensity(5,BR); attachInterrupt(digitalPinToInterrupt(inck), InterCK, RISING); // INTERRUPTION FALLING, RISING. noTone(buz); } void loop() { do { if (ONDA==25) digitalWrite(SEC,HIGH); // Init of the Second 25 if (ONDA==fset ) {digitalWrite(SEC,LOW); SeU++;} // End of the second. 50 } while (ONDA<fset); // 50 ONDA=0; if (digitalRead(SON)==LOW) tone(buz, 1000, 60); // PORT, NOTE, TIME. Escribe(); AQUI: if (digitalRead(SET)==LOW) { if(digitalRead(BRI)==HIGH) BR=15; else BR=9; // Set Brightness lc.setIntensity(0,BR); // Brightness Value lc.setIntensity(1,BR); lc.setIntensity(2,BR); lc.setIntensity(3,BR); lc.setIntensity(4,BR); lc.setIntensity(5,BR); digitalWrite(LSET,HIGH); digitalWrite(SEC,LOW); delay(300); // For SET Switch if(digitalRead(Min)==LOW) {SeD=0; SeU=0; MiU++;} // Set Minuts if(digitalRead(Hour)==LOW) {SeD=0; SeU=0;HoU++;} // Set Hours Escribe(); } if (digitalRead(SET)==LOW) goto AQUI; digitalWrite(LSET,LOW); } void InterCK() // Interruption Subroutine. { ONDA++; } void Escribe() { if (SeU %2==0) {DPs=1;} else {DPs=0;} // Odd_even unit if(SeU==10) {SeU=0; SeD++;} if(SeD==6) {SeD=0; SeU=0; MiU++;} if(MiU==10) {MiU=0; SeD=0; SeU=0; MiD++;} if(MiD==6) {MiD=0; MiU=0; SeD=0; SeU=0; HoU++;} if(HoU==10) {HoU=0; MiD=0; MiU=0; SeD=0; SeU=0; HoD++;} if(HoD==2 && HoU==4) {HoD=0; HoU=0; MiD=0; MiU=0; SeD=0; SeU=0;} Digitos(0,SeU); // Second Unit. Digitos(1,SeD); // Second Ten. Digitos(2,MiU); // Minute Unit Digitos(3,MiD); // Minute Ten Digitos(4,HoU); // Hour Unit Digitos(5,HoD); // Hour Ten } void Digitos(int Pos, int Number) { if(Number==0) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x4c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x4c | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x4c | dp); // Lower dp); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x4c | dp); // Lower dp);); lc.setRow(Pos,6,0x4c); // Lower dp); lc.setRow(Pos,7,0x38); } if(Number==1) { lc.setRow(Pos,0,0x18); lc.setRow(Pos,1,0x38); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x18 | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x18 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x18 | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x18 | dp); // Lower dp lc.setRow(Pos,6,0x18); lc.setRow(Pos,7,0x3c); } if(Number==2) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x0c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x0c | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x18 | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x20 | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x7c); } if(Number==3) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x0c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x18 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x0c | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x0c | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x38); } if(Number==4) { lc.setRow(Pos,0,0x0c); lc.setRow(Pos,1,0x1c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x2c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x4c | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x7c | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x0c | dp); // Lower dp lc.setRow(Pos,6,0x0c); lc.setRow(Pos,7,0x1e); } if(Number==5) { lc.setRow(Pos,0,0x7c); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x40 | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x78 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x0c | dp); // Lower dp.); if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x0c | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x38); } if(Number==6) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x40 | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x78 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x4c | dp); // Lower dp.); if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x4c | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x38); } if(Number==7) { lc.setRow(Pos,0,0x7c); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x0c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x08 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x10 | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x10 | dp); // Lower dp lc.setRow(Pos,6,0x10); lc.setRow(Pos,7,0x38); } if(Number==8) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x4c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x38 | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x4c | dp); // Lower dp.); if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x4c | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x38); } if(Number==9) { lc.setRow(Pos,0,0x38); lc.setRow(Pos,1,0x4c); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits. lc.setRow(Pos,2,0x4c | dp); // Higher dp. if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,3,0x4c | dp); // Higher dp.); if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,4,0x3c | dp); // Lower dp.); if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); lc.setRow(Pos,5,0x0c | dp); // Lower dp lc.setRow(Pos,6,0x4c); lc.setRow(Pos,7,0x38); } }SUBCIRCUITS:This example integrates several subcircuits located in the "data" folder into the ZIP attached. This folder must always be next to the "sim1" scheme so that it can be executed. A subcircuit is a “custom” circuit that accumulates a set of Simulide base components (primitive function) to obtain a new or an adapted function. These subcircuits are treated by Simulide as another component of its own structure. User can create his own subcircuits or use the ones published here in your own designs once the procedure is known, explained in detail in the Simulide tutorials: https://simulide.com/p/subcircuits/* Communication with the author: Simulide/User/Messages/DefranP. de Francisco.
358__LED_MATRIX CLOCK_WITH 50Hz TIME BASE. (Simulide R2220 or Higher)
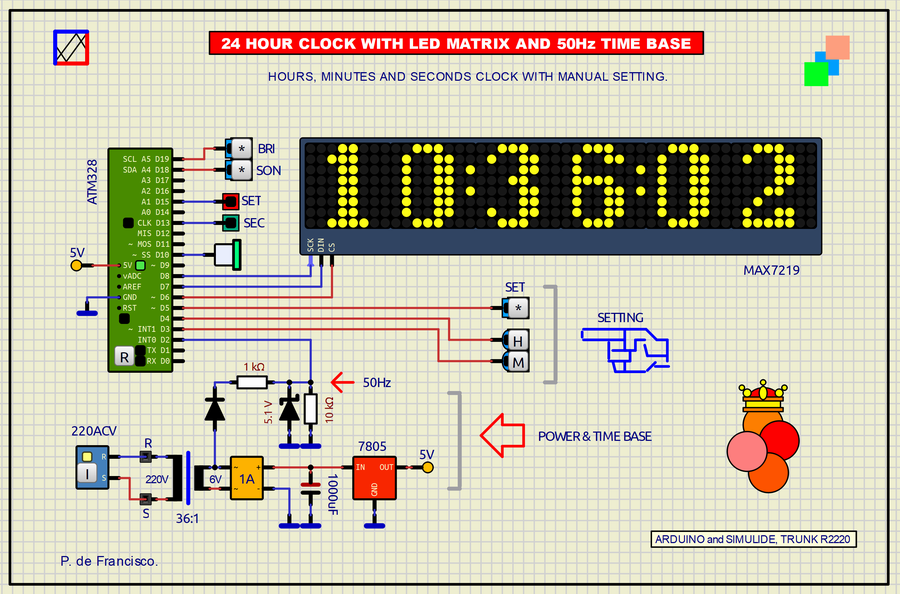
This example is a 24-hour clock with 6 8x8 LED matrices, manual time setting, two brightness levels and audible seconds indication. At startup it starts counting from zero, with the SEC LED flashing. To adjust the time, press the [SET] switch (the SET LED lights up). Press and hold the [H] or [M] buttons to adjust the hours and minutes respectively. In this state the seconds are reset to zero and by pressing [BRI] you can change the brightness level of the display LEDs. Pressing [SET] again starts the clock counting. Pressing the [SON] switch activates a short tone every second.
SCHEMA:
The scheme is based on Atmel's ATM328 controller (Arduino UNO controller). The display is a "conceptually continuous" matrix of 6 8x8 LED digits. with SCK, DIN and CS inputs to access the MAX7219CNG integrated circuits of each digit. Three switches SET, BRI and SON and two buttons H and M with ground connection are used, all for the respective functions already described. There are two indicator LEDs, cathode to ground (SET and SEC). The circuit power supply (outside the simulator) is provided by a 0.6VA transformer with a 6V output followed by a bridge rectifier, filter and regulator to obtain 5V DC. The AC signal for the clock is taken from one of the secondary outputs, it is rectified and regulated to 5.1V to obtain positive pulses of 50Hz (electrical network frequency). This signal will activate the controller's Int0 interrupt as a time base signal. The 50Hz frequency is very stabilized and self-regulated by the electric company, so in reality it behaves practically like a quartz oscillator.
PROGRAM:
Arduino C program that uses the "LedControl.h" library and Interrupt 0 to capture the clock signal at 50Hz. Contains comments on the main points of the development idea.
// LED MATRIX CLOCK 24 HOURS WITH ELECTRICAL NETWORK TIME BASE (50Hz). DEFRAN24
#include "LedControl.h"
LedControl lc=LedControl(7,8,6,6); // DIN, CK, CS, NUM.
int HoD=0, HoU=0, MiD=0, MiU=0, SeD=0, SeU=0, Min=3, Hour=4;
int SET=5;
int buz=10;
int SEC=13;
int DPs=0;
int BRI=19;
int SON=18;
int dp;
int inck=2; // 50Hz Interrupt Input.
int LSET=15;
int ONDA=0; // Pulses counter
int BR=15; // Brightness Value.
int fset=48; // Max 50.
void setup()
{
pinMode(SET, INPUT_PULLUP);
pinMode(Hour, INPUT_PULLUP);
pinMode(Min, INPUT_PULLUP);
pinMode(BRI, INPUT_PULLUP);
pinMode(SON, INPUT_PULLUP);
pinMode(buz, OUTPUT);
pinMode(SEC, OUTPUT);
pinMode(inck, INPUT); // Network 50Hz input.
pinMode(LSET, OUTPUT);
digitalWrite(SEC, LOW);
lc.shutdown(0,false); lc.shutdown(1,false); lc.shutdown(2,false);
lc.shutdown(3,false); lc.shutdown(4,false); lc.shutdown(5,false);
lc.setIntensity(0,BR); lc.setIntensity(1,BR); lc.setIntensity(2,BR);
lc.setIntensity(3,BR); lc.setIntensity(4,BR); lc.setIntensity(5,BR);
attachInterrupt(digitalPinToInterrupt(inck), InterCK, RISING); // INTERRUPTION FALLING, RISING.
noTone(buz);
}
void loop()
{
do
{
if (ONDA==25) digitalWrite(SEC,HIGH); // Init of the Second 25
if (ONDA==fset ) {digitalWrite(SEC,LOW); SeU++;} // End of the second. 50
}
while (ONDA<fset); // 50
ONDA=0;
if (digitalRead(SON)==LOW) tone(buz, 1000, 60); // PORT, NOTE, TIME.
Escribe();
AQUI:
if (digitalRead(SET)==LOW)
{
if(digitalRead(BRI)==HIGH) BR=15; else BR=9; // Set Brightness
lc.setIntensity(0,BR); // Brightness Value
lc.setIntensity(1,BR);
lc.setIntensity(2,BR);
lc.setIntensity(3,BR);
lc.setIntensity(4,BR);
lc.setIntensity(5,BR);
digitalWrite(LSET,HIGH);
digitalWrite(SEC,LOW);
delay(300); // For SET Switch
if(digitalRead(Min)==LOW) {SeD=0; SeU=0; MiU++;} // Set Minuts
if(digitalRead(Hour)==LOW) {SeD=0; SeU=0;HoU++;} // Set Hours
Escribe();
}
if (digitalRead(SET)==LOW) goto AQUI;
digitalWrite(LSET,LOW);
}
void InterCK() // Interruption Subroutine.
{
ONDA++;
}
void Escribe()
{
if (SeU %2==0) {DPs=1;} else {DPs=0;} // Odd_even unit
if(SeU==10) {SeU=0; SeD++;}
if(SeD==6) {SeD=0; SeU=0; MiU++;}
if(MiU==10) {MiU=0; SeD=0; SeU=0; MiD++;}
if(MiD==6) {MiD=0; MiU=0; SeD=0; SeU=0; HoU++;}
if(HoU==10) {HoU=0; MiD=0; MiU=0; SeD=0; SeU=0; HoD++;}
if(HoD==2 && HoU==4) {HoD=0; HoU=0; MiD=0; MiU=0; SeD=0; SeU=0;}
Digitos(0,SeU); // Second Unit.
Digitos(1,SeD); // Second Ten.
Digitos(2,MiU); // Minute Unit
Digitos(3,MiD); // Minute Ten
Digitos(4,HoU); // Hour Unit
Digitos(5,HoD); // Hour Ten
}
void Digitos(int Pos, int Number)
{
if(Number==0)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x4c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x4c | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x4c | dp); // Lower dp);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x4c | dp); // Lower dp););
lc.setRow(Pos,6,0x4c); // Lower dp);
lc.setRow(Pos,7,0x38);
}
if(Number==1)
{
lc.setRow(Pos,0,0x18);
lc.setRow(Pos,1,0x38);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x18 | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x18 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x18 | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x18 | dp); // Lower dp
lc.setRow(Pos,6,0x18);
lc.setRow(Pos,7,0x3c);
}
if(Number==2)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x0c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x0c | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x18 | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x20 | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x7c);
}
if(Number==3)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x0c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x18 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x0c | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x0c | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x38);
}
if(Number==4)
{
lc.setRow(Pos,0,0x0c);
lc.setRow(Pos,1,0x1c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x2c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x4c | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x7c | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x0c | dp); // Lower dp
lc.setRow(Pos,6,0x0c);
lc.setRow(Pos,7,0x1e);
}
if(Number==5)
{
lc.setRow(Pos,0,0x7c);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x40 | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x78 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x0c | dp); // Lower dp.);
if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x0c | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x38);
}
if(Number==6)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x40 | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x78 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x4c | dp); // Lower dp.);
if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x4c | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x38);
}
if(Number==7)
{
lc.setRow(Pos,0,0x7c);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x0c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x08 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x10 | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x10 | dp); // Lower dp
lc.setRow(Pos,6,0x10);
lc.setRow(Pos,7,0x38);
}
if(Number==8)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x4c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x38 | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x4c | dp); // Lower dp.);
if(DPs==0 &&(Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x4c | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x38);
}
if(Number==9)
{
lc.setRow(Pos,0,0x38);
lc.setRow(Pos,1,0x4c);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00); // 3..0 digits.
lc.setRow(Pos,2,0x4c | dp); // Higher dp.
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,3,0x4c | dp); // Higher dp.);
if(DPs==1 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,4,0x3c | dp); // Lower dp.);
if(DPs==0 && (Pos==2 || Pos==4)) dp=0x01; else (dp=0x00);
lc.setRow(Pos,5,0x0c | dp); // Lower dp
lc.setRow(Pos,6,0x4c);
lc.setRow(Pos,7,0x38);
}
}